圖片:

圖片:

圖片:
圖片:
圖片:
圖片:
圖片:

圖片:

圖片:

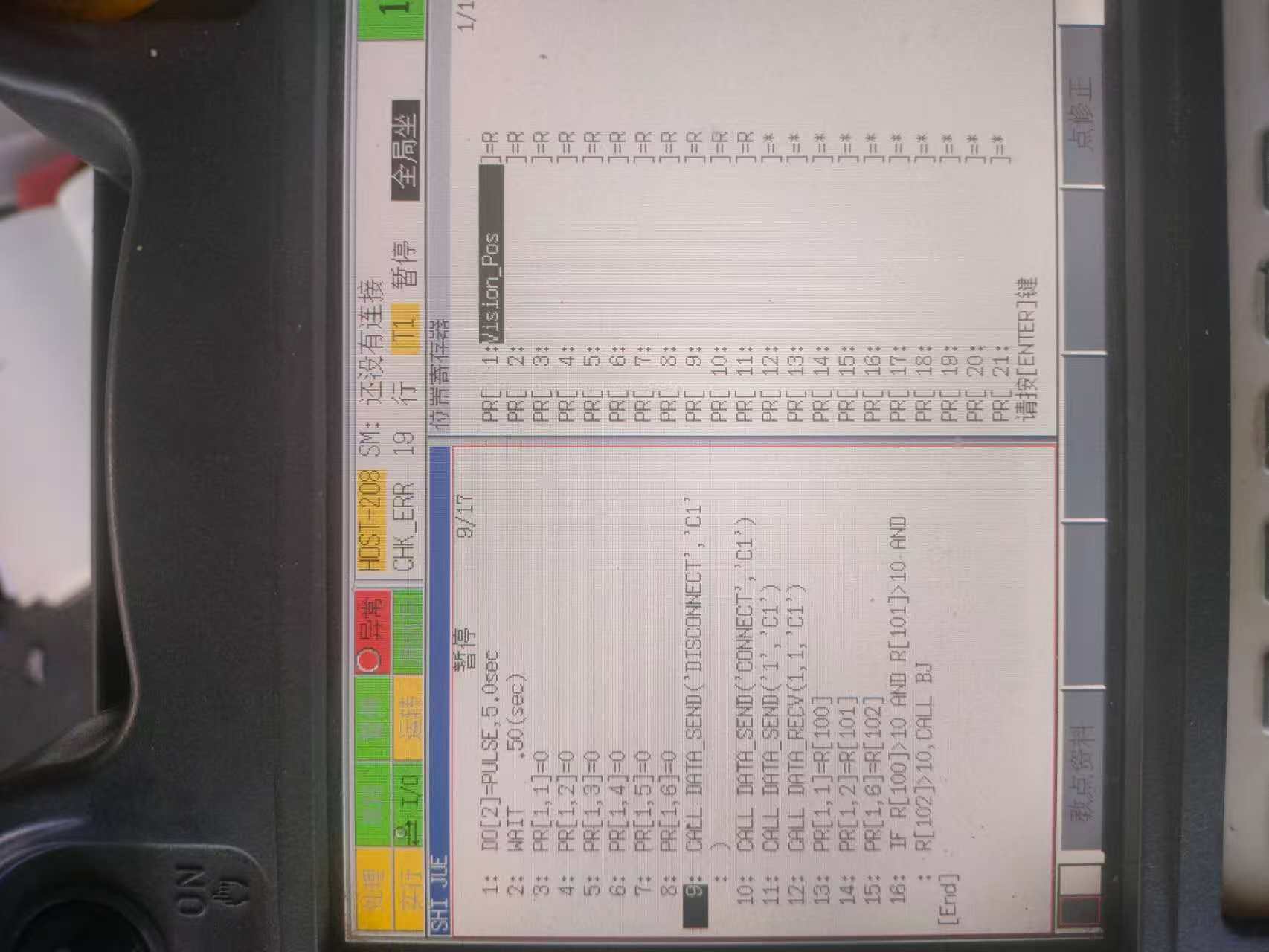
發(fā)那科機(jī)器人報(bào)警代碼 H0ST-208 SM:還沒有連接 H0ST-209 SM:連接已強(qiáng)制結(jié)束
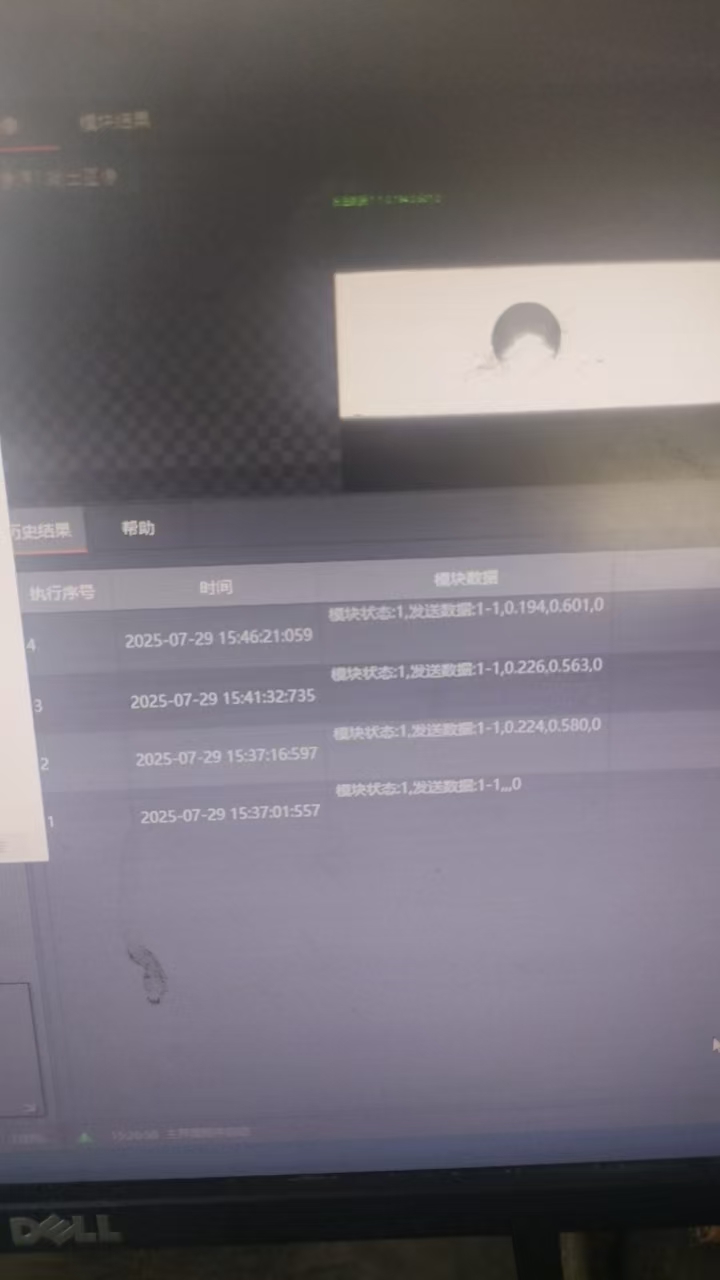
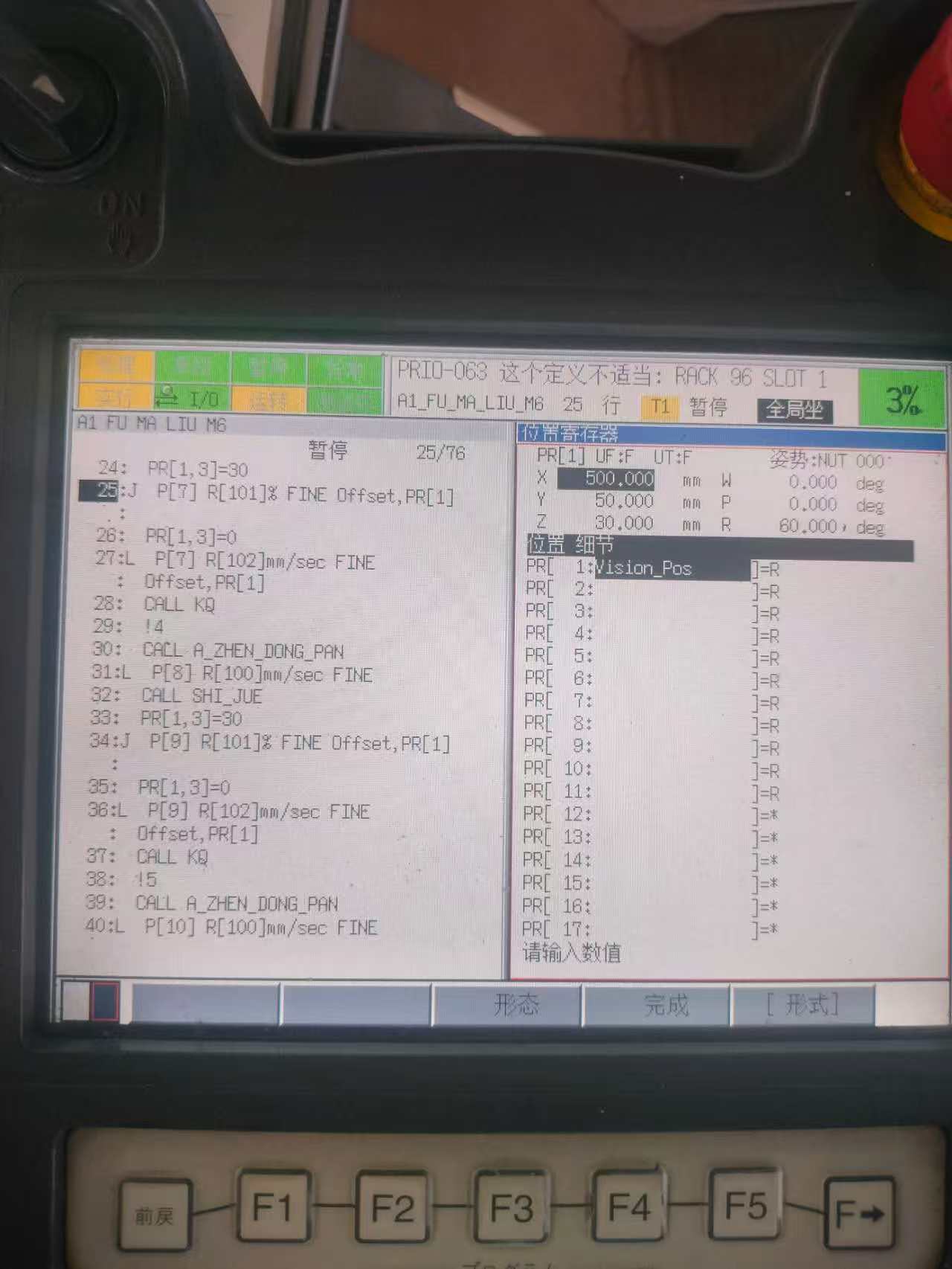
然后他是和海康相機(jī)走的MODBUS TCP/IP,是一個(gè)類似于孔定位打螺絲的設(shè)備,而且相機(jī)給的偏移數(shù)據(jù)在顯示器上查看都是對的,但是機(jī)器人這邊寄存器收到的數(shù)據(jù)跟相機(jī)的不一樣,而且還很大
網(wǎng)線,交換機(jī)端口,交換機(jī)都換過了,本來接地沒接,又把接地接上,
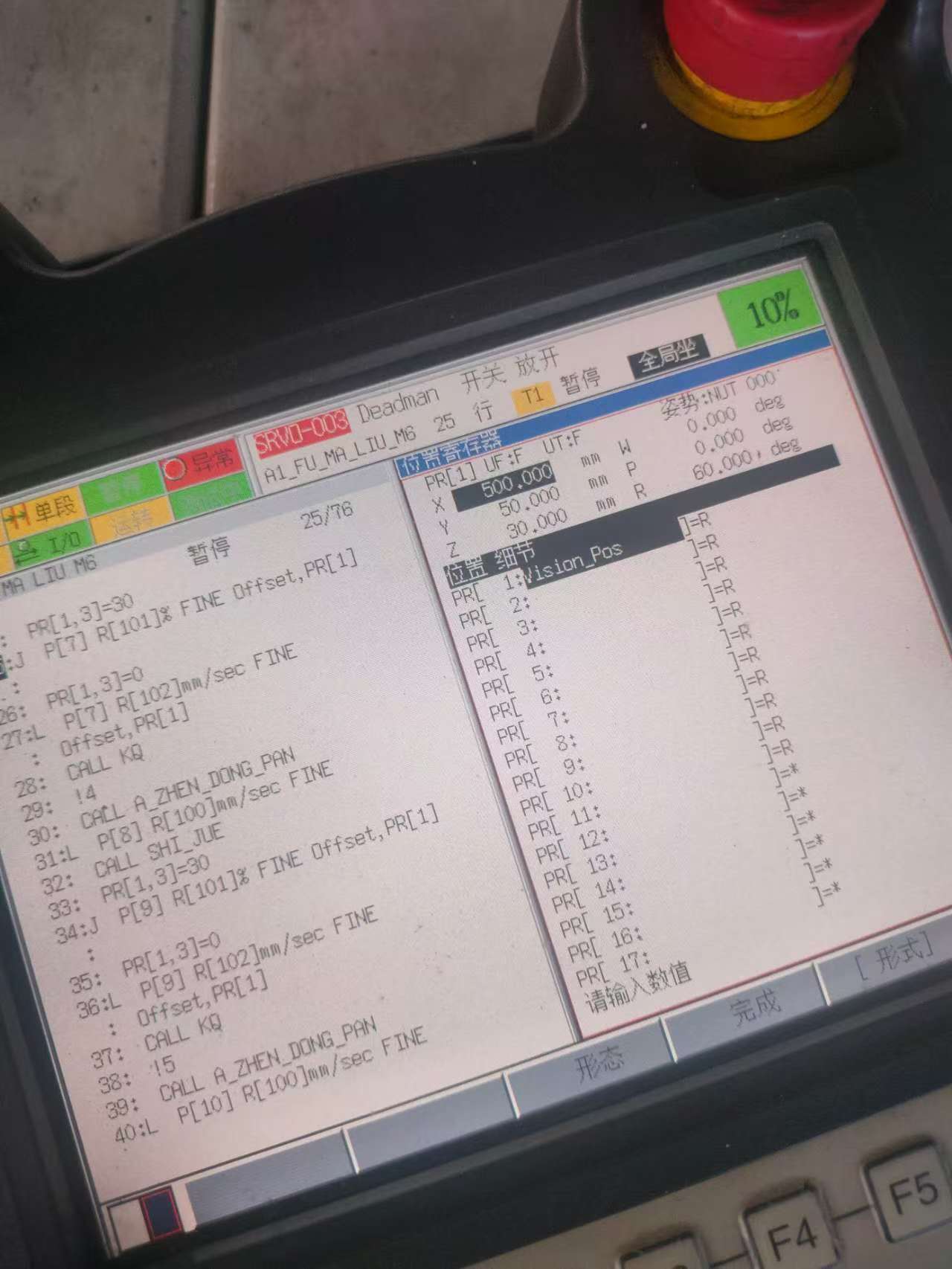
他這個(gè)報(bào)警,很不穩(wěn)定,有時(shí)候機(jī)器人斷電重啟就好了,有時(shí)候自己就好了,有時(shí)候上步程序定位,走的位置都沒問題,下一步就報(bào)警,連接已強(qiáng)制結(jié)束
 滬公網(wǎng)安備31010802001143號
滬公網(wǎng)安備31010802001143號

